Your cart is currently empty!
KIT DE ROBOTICA BASADO EN ARDUINO
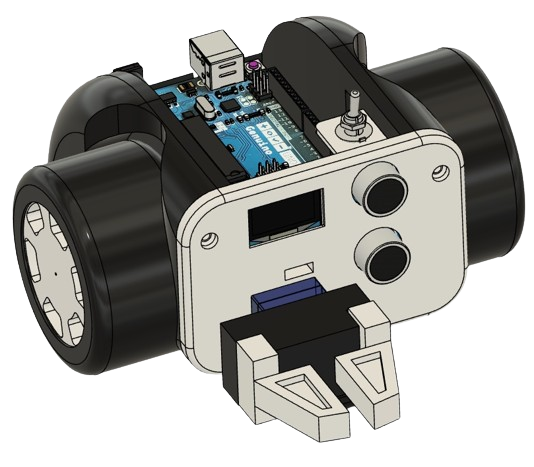
El Kit de Robótica Basado en Arduino es una solución completa para aprender y experimentar con la robótica y la programación.
20% DESCUENTO
20% DESCUENTO
20% DESCUENTO

20% DESCUENTO

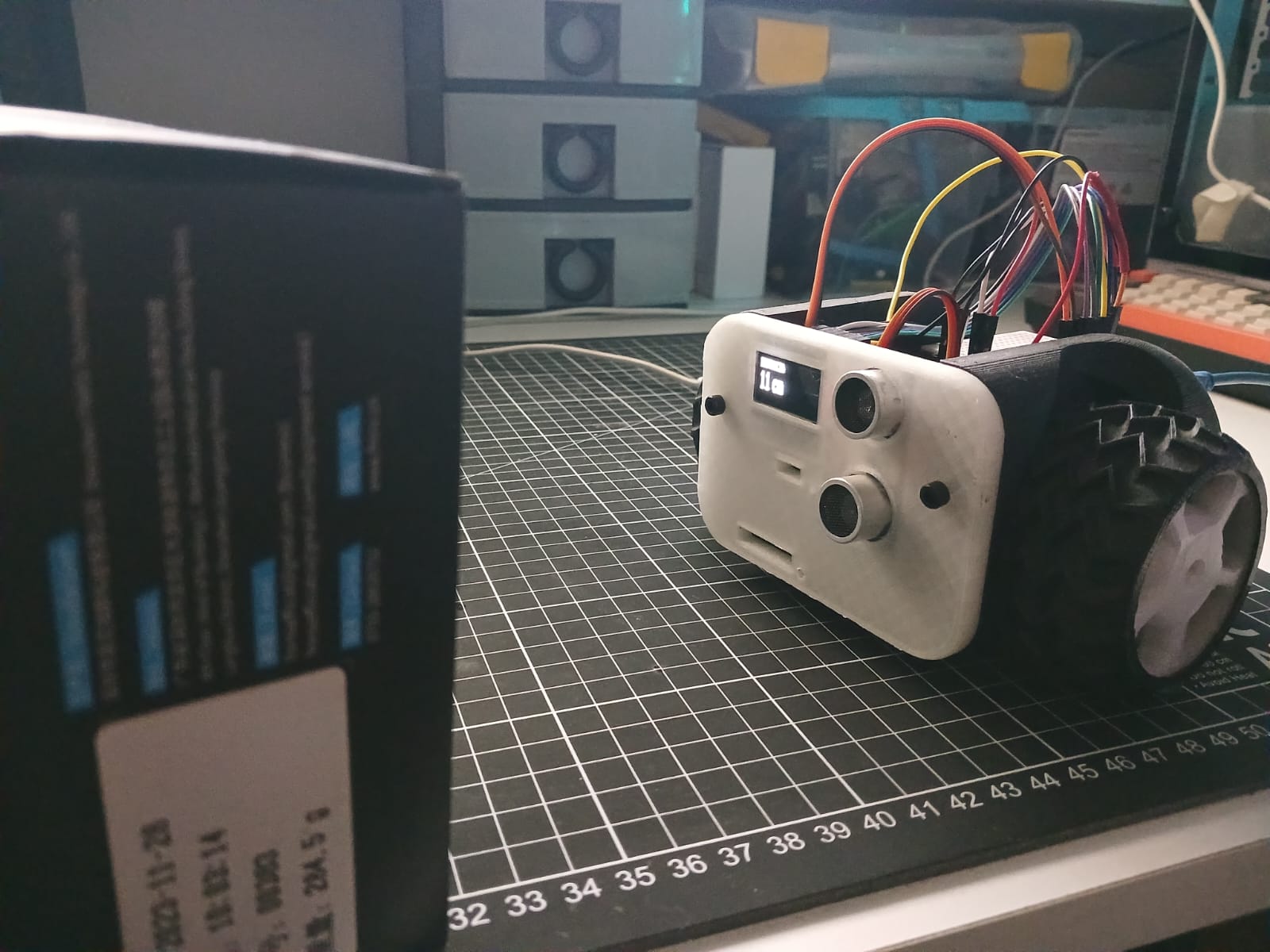
Crear un robot que use servomotores y un sensor ultrasónico HC-SR04 para evitar obstáculos es un proyecto interesante y educativo. Los servos pueden ser útiles para mover el robot en diferentes direcciones o ajustar la posición de los componentes, mientras que el sensor ultrasónico se encarga de medir las distancias y detectar obstáculos.
En este proyecto, el sensor HC-SR04 medirá la distancia a los objetos cercanos. Si un obstáculo es detectado dentro de un rango determinado (por ejemplo, 20 cm), el robot tomará una acción, como girar o retroceder. Los servomotores controlarán el movimiento del robot y las direcciones de las ruedas.
El código que se muestra a continuación hace que el robot avance hasta que detecte un obstáculo. En caso de que se detecte un obstáculo dentro del rango, el robot girará.
#include <Servo.h>
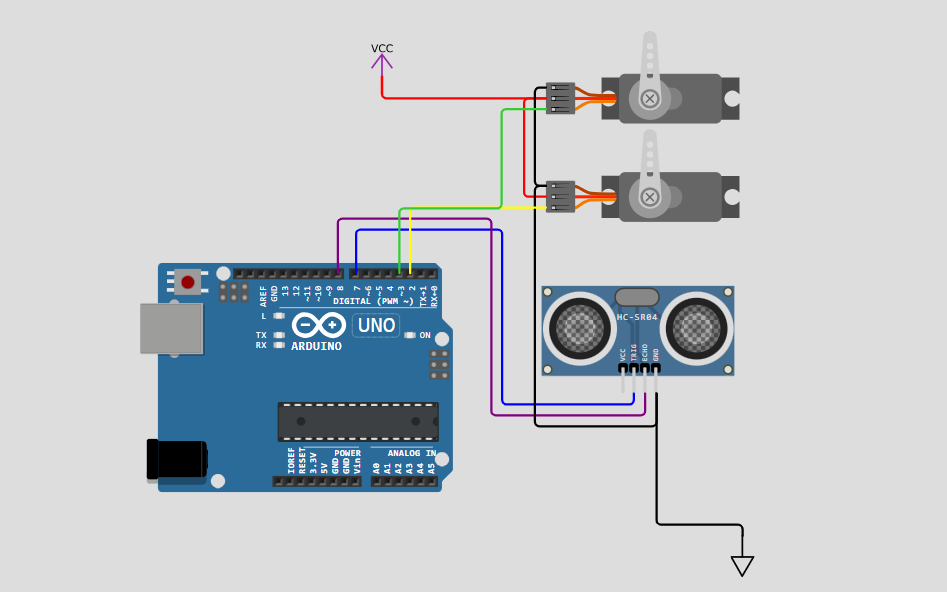
#define trigPin 7
#define echoPin 8
#define servoPin1 2
#define servoPin2 3
Servo servo1; // Servo para la rueda Derecha
Servo servo2; // Servo para la rueda Izquierda
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// Inicializa los servos
servo1.attach(servoPin1);
servo2.attach(servoPin2);
// Poner los servos en la posición inicial
servo1.write(90); // Posición 90 es hacia adelante
servo2.write(90); // Posición 90 es hacia adelante
}
void loop() {
long duration, distance;
// Enviar pulso ultrasónico
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Medir el tiempo que tarda en volver el pulso
duration = pulseIn(echoPin, HIGH);
// Calcular la distancia en cm
distance = (duration / 2) / 29.1;
// Imprimir la distancia
Serial.print("Distancia: ");
Serial.print(distance);
Serial.println(" cm");
// Si detecta un obstáculo a menos de 20 cm
if (distance < 20) {
// Detenerse
stopMovement();
delay(500); // Pausa
// Girar a la derecha (por ejemplo, moviendo el servo del lado derecho)
turnRight();
delay(1000); // Tiempo para girar
// Continuar avanzando después de girar
moveForward();
delay(500); // Pausa
} else {
// Continuar avanzando si no hay obstáculos
moveForward();
}
}
// Función para mover hacia adelante
void moveForward() {
servo1.write(0); // Avanzar con servo 1 (gira en sentido adecuado)
servo2.write(180); // Avanzar con servo 2 (gira en sentido adecuado)
}
// Función para detener los motores
void stopMovement() {
servo1.write(90); // Detener
servo2.write(90); // Detener
}
// Función para girar a la derecha
void turnRight() {
servo1.write(90); // Mantener en posición
servo2.write(180); // Mover la rueda trasera a la izquierda (giro hacia la derecha)
delay(500); // Pausa para completar el giro
servo2.write(90); // Regresar la rueda trasera a la posición neutral
}
servo.write(90) coloca los servos en una posición neutral (hacia adelante), y al cambiar esa posición, el robot puede girar.Este proyecto te permitirá practicar la integración de sensores y actuadores, además de aprender sobre el control de servomotores con Arduino. ¡Espero que disfrutes el proceso de construcción y programación de tu robot!
 Add Contact: +51946987981
Amount to PayS/0.00
Add Contact: +51946987981
Amount to PayS/0.00
You must scan the QR code, click continue to attach the screenshot (it is the only proof of payment) and you will be able to complete the purchase.