Your cart is currently empty!
KIT DE ROBOTICA BASADO EN ARDUINO
El Kit de Robótica Basado en Arduino es una solución completa para aprender y experimentar con la robótica y la programación.
20% DESCUENTO
20% DESCUENTO
20% DESCUENTO

20% DESCUENTO


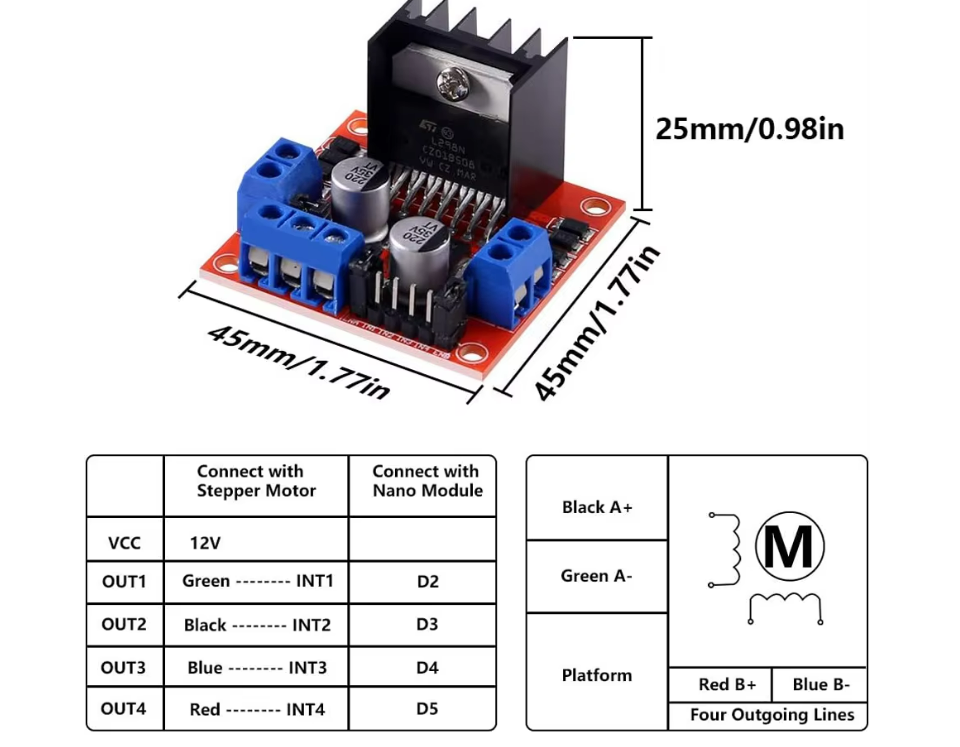
El L298N es un integrado que se utiliza para controlar motores de corriente continua (DC) y motores paso a paso (stepper) mediante un puente H. El puente H es un circuito electrónico que permite controlar la dirección y la velocidad de los motores mediante señales de control. El L298N, en particular, es un controlador de motores en un encapsulado de 15 pines que se utiliza comúnmente en proyectos de robótica y automatización.
El L298N es un integrado que se utiliza para controlar motores de corriente continua (DC) y motores paso a paso (stepper) mediante un puente H. El puente H es un circuito electrónico que permite controlar la dirección y la velocidad de los motores mediante señales de control. El L298N, en particular, es un controlador de motores en un encapsulado de 15 pines que se utiliza comúnmente en proyectos de robótica y automatización.
Un puente H se compone de cuatro interruptores (transistores o MOSFETs), y permite controlar la corriente que fluye a través del motor, lo que determina tanto su dirección como su velocidad. Al activar los interruptores de manera adecuada, el motor puede girar en ambos sentidos (horario y antihorario).
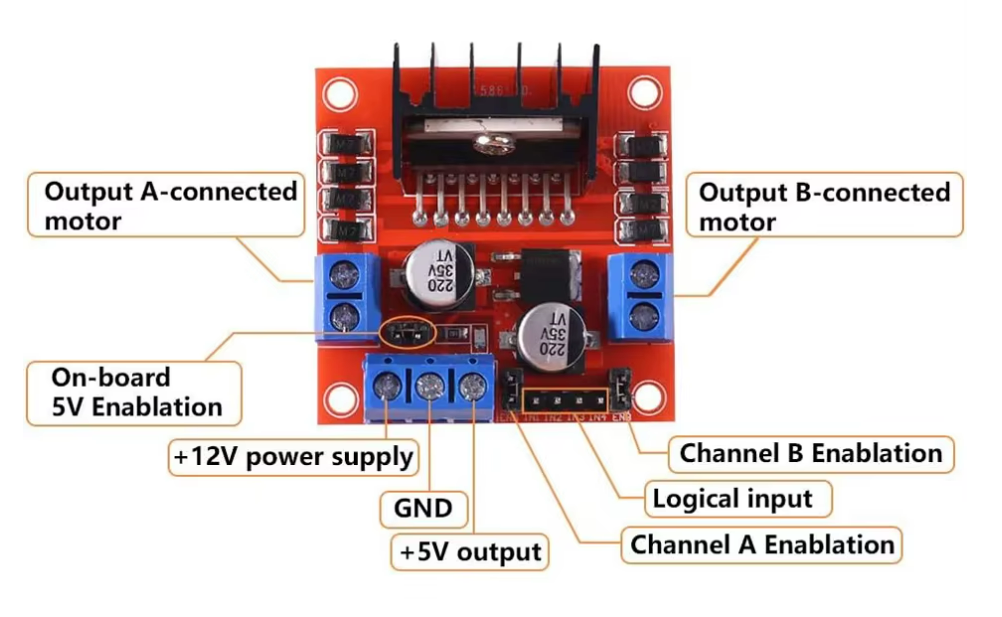
Con el L298N, podemos controlar la dirección mediante las entradas IN1, IN2 para el motor A y las entradas IN3, IN4 para el motor B. Al activar los pines de control, el puente H cambia la dirección del flujo de corriente a través de las bobinas del motor, logrando que gire en un sentido o en otro.
El L298N es una excelente opción para controlar motores en proyectos de bajo y medio voltaje. Su diseño de puente H lo hace ideal para controlar la dirección y velocidad de los motores de manera eficiente. Es muy utilizado en robots y otros sistemas de automatización para la conducción precisa de motores.
 Add Contact: +51946987981
Amount to PayS/0.00
Add Contact: +51946987981
Amount to PayS/0.00
You must scan the QR code, click continue to attach the screenshot (it is the only proof of payment) and you will be able to complete the purchase.





Reviews
There are no reviews yet.